Challenge: Goal Seeker
In this challenge your robot needs to drive toward a specified goal P while avoiding up to 3 obstacles that will block the robot's path.
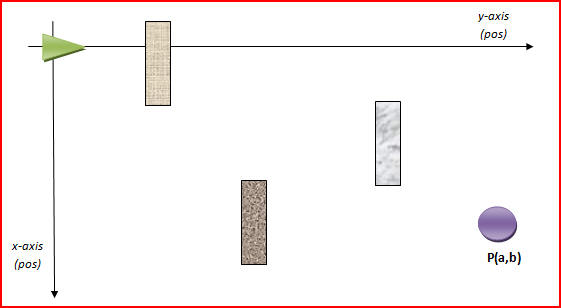
Your robot needs to start at the origin of a super-imposed Cartesian coordinate system, facing "north" (in the direction of the positive y-axis). The treasure is a blue dot pointed on the floor and is located in the first quadrant at position P(a, b). You will be given the values for a and b in centimeters just before the challenge begins, with 0 < a, b < 200cm. Up to three rectangular, non-touching obstacles will be placed randomly but parallel to the x-axis into the world, obstructing the direct path from the origin (0,0) to the goal P(a,b). Each obstacle is at most 20 cm long and 5 cm wide (similar in size to book). Your robot must reach point P and stop on or close to it without hitting any of the obstacles.
Note: We'll first try the challenge with one obstacle, then with two, and if there are candidates left, with three.
Scoring
You must be successful in at least 1 of 2 trials and you have 10 minutes to prepare after learning the course layout. You receive 70 points if your robot heads in the generally right direction. If your robot stops within 20 cm of the goal you receive an additional 10 points, 20 extra points if it is within 10 cm, or 30 extra points if it stops while touching the goal. 5 points are subtracted each time you touch any of the obstacles.
Results from 11/05/2008:
Even on the day after the historic US presidential election the "show must go on". Some people still struggle with the Java programming environment, but more are making progress: three teams took up the challenge this time, all successfully.
We used the points (0, 160) and two obstacles for this challenge on a nice, smooth surface.
Score Team A: 100 Team B: 100 Team C: 100 Team D: 0 Team E: 0
Click here to watch the outcomes of this challenge.
Instructor's Sample Movies
- Goal Seeker 1 (standard design with fixed ultrasonic sensor)
- Goal Seeker 2 (design with moving ultrasonic sensor and dual-thread program)