Home -> Teaching -> CSAS 3085/PSYC 3698 -> Task: Path Integration
When foraging for food, the Cataglyphis Ant, which lives in the Sahara Desert, embarks on a seemingly random journey from its nest equivalent to an astonishing 40 miles (relative to its size), yet it can run directly back to its nest using the shortest path possible once it finds food. It forages at random to locate food - other insects that succumbed to the heat - but once it finds food, it needs to return to its nest as quickly as possible so that it does not die from heat exposure itself.
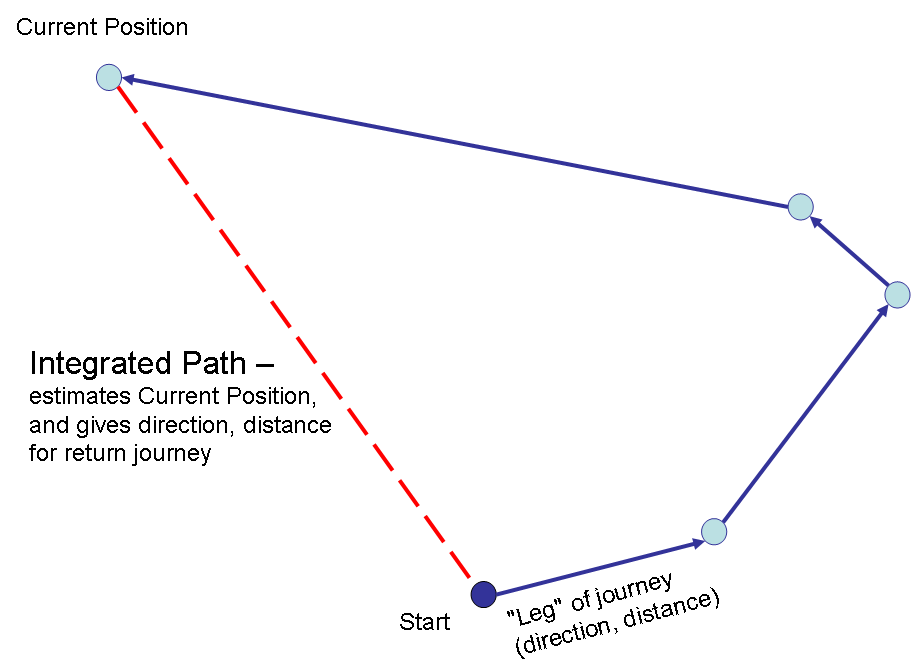
As you can see in the above movie clips, the ant keeps track of each change of
directions by checking its orientation relative to the sun. It also counts its
steps, so that it knows how far it went each time it moves without changing directions.
Thus, it knows at all times exactly how far away it is from its nest and in
which direction the nest is, so it can return quickly to its nest in a straight
line. This technique is called path integration.
Your task is to simulate this behavior and to move like an ant in the hot desert.
For part 1 of this challenge, place your robot in the "nest". Execute a squence of turns to random coordinates. Make sure to stay inside an area of 1 m by 1.3 m. When you are done, your ant should beep or make some other noise, then return via a straight line from its current position back to its nest as fast as possible.
Note that this type of path integration is based on "dead recconing", i.e. your robot computes its new position without being able to verify it using any sensors. It can therefore not correct for any mistakes.
Many animals navigate by dead reconning (path inegration) but they frequently have developed a way to correct their position occasionally, for example by comparing their position in relation to known landmarks.
In the second part of this challenge, the ant needs to locate some food that is placed somewhere in a rectangular area. The food is represented by a large green dot. As soon as the ant has found the food it should stop searching and return to the nest in a straight line. So, while in part 1 you need to complete a fixed number of moves and then return to your nest, in part 2 you need to search for the food (green dot) and you can only return to your nest once you located the food.
Your ant could employ a number of different search algorithms. One idea, for example, is to move to random locations in the searchable area, hoping you might stumble on the food along the way. Another search pattern might be to search the area in an organized pattern such as straight lines from one end of the search area to the next. Yet another idea might be to go to the middle of the searchable area, then move in an outward spiral pattern until you discover the food.
Extra credit: For extra credit, display the coordinates of the food when your ant has returned to its nest. That would be important so that other ants could go straight to the food to harvest it (assuming that ants can communicate coordinates to each other).
Bert G. Wachsmut>
Last modified:
03/06/16
Archive: 2014-01 -
2009-03